YCB Video Synthesis
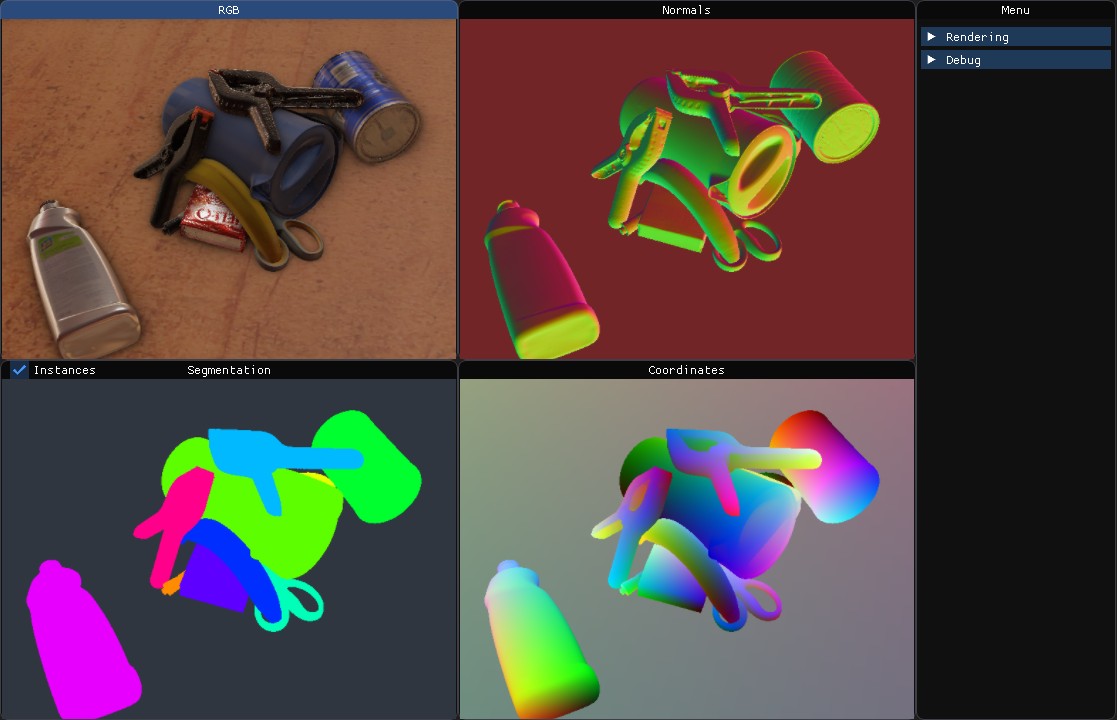
This example demonstrates the usage of the stillleben library by generating synthetic scenes that have roughly similar composition to the scenes of the YCB Video Dataset.
For details on the dataset, see:
Yu Xiang, et al. 2017:
PoseCNN: A Convolutional Neural Network for 6D Object Pose Estimation in Cluttered Scenes
import stillleben as sl import pathlib import random import torch from PIL import Image # Some boring details about the dataset CLASSES = ( '__background__', '002_master_chef_can', '003_cracker_box', '004_sugar_box', '005_tomato_soup_can', '006_mustard_bottle', '007_tuna_fish_can', '008_pudding_box', '009_gelatin_box', '010_potted_meat_can', '011_banana', '019_pitcher_base', '021_bleach_cleanser', '024_bowl', '025_mug', '035_power_drill', '036_wood_block', '037_scissors', '040_large_marker', '051_large_clamp', '052_extra_large_clamp', '061_foam_brick', ) RESOLUTION = (640, 480) INTRINSICS = (1066.778, 1067.487, 312.9869, 241.3109) def run(ycb_path, ibl_path, plane_texture_path): mesh_path = pathlib.Path(ycb_path) / 'models' if ibl_path: ibl_path = pathlib.Path(ibl_path) sl.init() # use sl.init_cuda() for CUDA interop # Load all meshes meshes = sl.Mesh.load_threaded([ mesh_path / c / 'textured.obj' for c in CLASSES[1:]]) # Setup class IDs for i, mesh in enumerate(meshes): mesh.class_index = i+1 # Create a scene with matching intrinsics scene = sl.Scene(RESOLUTION) scene.set_camera_intrinsics(*INTRINSICS) for mesh in random.sample(meshes, 10): obj = sl.Object(mesh) # Override the metallic/roughness parameters so that it gets interesting obj.metallic = random.random() obj.roughness = random.random() scene.add_object(obj) # Let them fall in a heap scene.simulate_tabletop_scene() # Setup lighting if ibl_path: scene.light_map = sl.LightMap(ibl_path) else: scene.choose_random_light_position() # Display a plane & set background color scene.background_plane_size = torch.tensor([3.0, 3.0]) scene.background_color = torch.tensor([0.1, 0.1, 0.1, 1.0]) if plane_texture_path: scene.background_plane_texture = sl.Texture2D(plane_texture_path) # Display interactive viewer sl.view(scene) # Render a frame renderer = sl.RenderPass() result = renderer.render(scene) # Save as JPEG Image.fromarray(result.rgb()[:,:,:3].cpu().numpy()).save('rgb.jpeg') if __name__ == "__main__": import argparse parser = argparse.ArgumentParser(description=__doc__) parser.add_argument('dataset', metavar='PATH', type=str, help='The path to the directory containing the "models" directory') parser.add_argument('--ibl', metavar='FILE.IBL', type=str, help='Use environment light map') parser.add_argument('--plane-texture', metavar='IMAGE', type=str, help='Use plane texture') args = parser.parse_args() run(ycb_path=args.dataset, ibl_path=args.ibl, plane_texture_path=args.plane_texture)